Acrobatics based on deep-learned MPC
In collaboration with Prof. Jonathan How, we developed a deep-learned robust tube model predictive controller. This controller combines computational efficiency and high performance, leading to a flight speed of 2 m/s and a sequence of challenging flight maneuvers, such as body saccades, wind disturbance rejection, and continuous body flips. This work was published as the cover article in Science Advances..

An hybrid flying and hopping robot
We developed a sub-gram hopping robot capable of traversing challenging terrains including grass, ice, glass, ice, and even a floating lotus leaf. This design leverages flapping-wing for lift force and torque production, and uses a passive elastic leg for hopping. This work was published in Science Advances.

An agile and long-endurant aerial robotic insect
We developed a new generation of flapping-wing micro aerial robot driven by soft artificial muscles. This robot can hover for over 1000 seconds, perform two consecutive somersaults in 0.16 seconds, and precisely track challenging trajectories. This work was published in Science Robotics.
Damage resilient soft actuators
In our recent work, we developed damage-resilient soft actuators for aerial robots. The actuators can be pierced repeatedly with needles. We further developed a laser-assisted recovery method analogous to conducting a “surgery” for artificial muscles. The robot demonstrated unprecedented damage resilience, opening up the potential of operating insect-scale aerial robots in challenging environments. Our work was published on Science Robotics as a cover article.
 credit: Sampson Wilcox
credit: Sampson WilcoxHere is a summarizing video made by the MIT news office:
Electroluminescent soft actuators
In a recent work, we enabled electroluminescence in power-dense soft actuators. Several vision-based cameras provide accurate motion reconstruction during robot flight. We hope this design will enable controlled flight outside of infrared motion capture areas. This work is published in IEEE Robotics and Autonomation Letters. Here is a summarizing video made by the MIT news office:
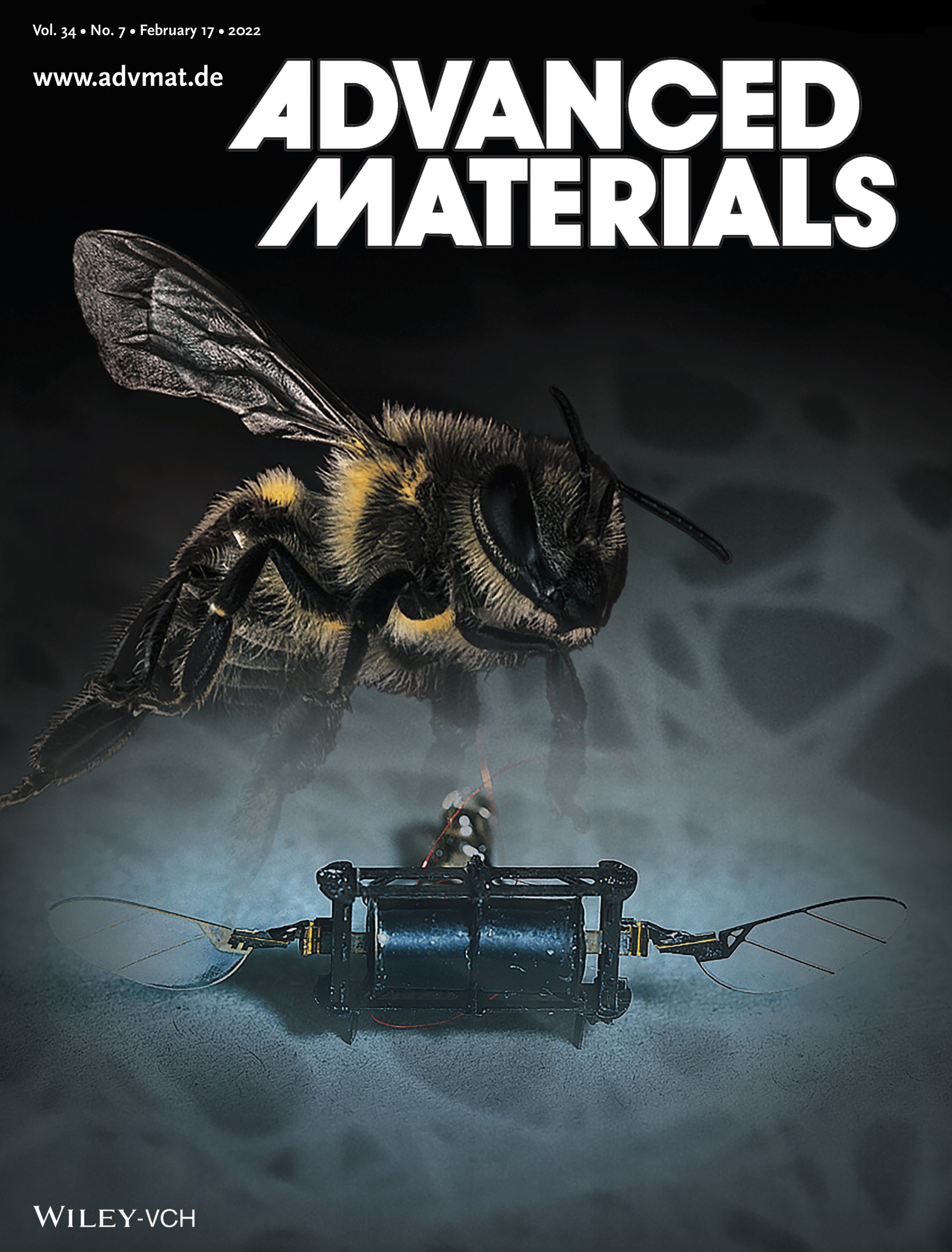
Low voltage and power dense soft actuators
In our recent work, we improved the soft fly’s net lift by another 80%, and we reduced the robot hovering voltage from 2000V to 500V. The actuator lifetime has improved by over 300%, reaching approximately 40 minutes of operation. This opens up exciting opportunities for pursuing power autonomous flights in soft-powered robots. Our work was published on Advanced Materials as a cover article.
 credit: Sampson Wilcox
credit: Sampson WilcoxHere is a summarizing video made by the MIT news office:
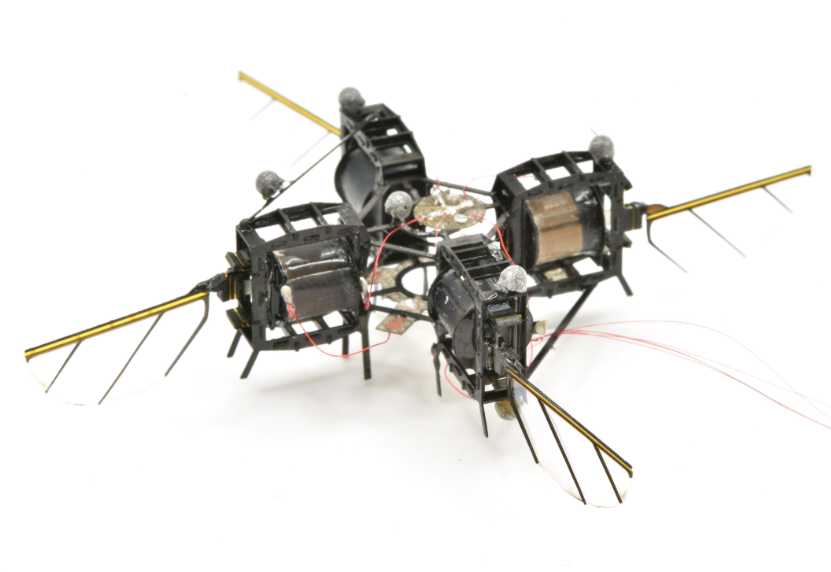
Aerial robot powered by soft actuators
In our recent work, we improved the soft fly’s net lift by 80%, and this enables novel flight capabilities such as collision recovery and somersaults. This is by far the most agile sub-gram soft aerial robot.
Here is a summarizing video made by the MIT news office:
This is the first heavier-than-air aerial robot that is solely actuated by soft actuators. In addition to demonstrating controlled flight, this robot can sense and survive in-flight collisions.
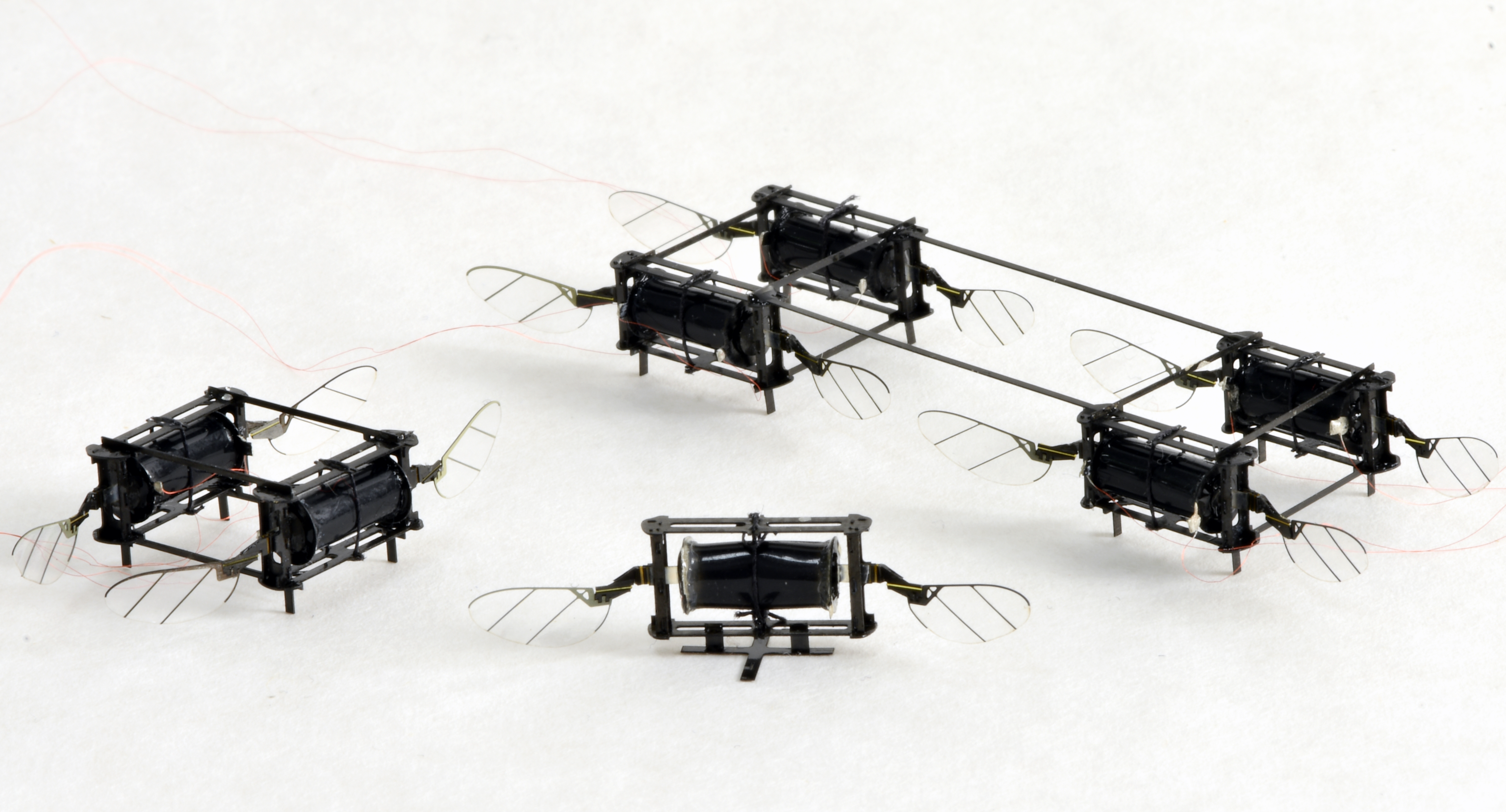
While traditional soft actuators have demonstrated muscle-like characteristics (high energy density, robustness, etc), many of these cannot operate at high frequencies (>100 Hz). We developed novel dielectric elastomer actuators (DEA) that can drive a flapping wing robot at 300 Hz. We further demonstrated open-loop takeoff, passively stable ascending flight, and closed-loop hovering flights in these robots. Not only are they resilient against collisions with nearby obstacles, they can also sense these impact events. This work shows soft robots can be agile, robust, and controllable, which are important for developing next generation of soft robots for diverse applications such as environmental exploration and manipulation.